PCz Rover Team
ZWYCIĘZCY UNIVERISTY ROVER CHALLENGE W 2018
Projekty


Modernity II+
Aktywność: 2019r.
Osiągnięcia:
- IV miejsce w międzynarodowych zawodach łazików URC 2019
- XI miejsce w międzynarodowych zawodach łazików ERC 2019

Modernity II
Aktywność: 2018r.
Osiągnięcia:
- Zwycięstwo w międzynarodowych zawodach łazików URC 2018

Modernity I
Aktywność: 2017r.
Osiągnięcia:
- III miejsce na międzynarodowych zawodach łazików URC 2017

Infinity III
Aktywność: 2015r. -2016r.
Osiągnięcia:
- VI miesjce w międzynarodowych zawodach łazików URC 2015
- IV miejsce w międzynarodowych zawodach łazików ERC 2015
- X miejsce w międzynarodowych zawodach łazików URC 2016
- XI miejsce w międzynarodowych zawodach łazików ERC 2016

Infinity II
Aktywność: 2014r.
Osiągnięcia:
- VI miejsce w międzynarodowych zawodach łazików ERC 2014

Infinity I
Aktywność: 2014r.
Osiągnięcia:
- X miejsce w międzynarodowych zawodach łazików URC 2014
Zespół

dr inż. Paweł Waryś
Opiekun koła naukowego

Marcin Bocheński
Team Leader, Mechanika, Mechatronika

Jakub Moskalik
Programowanie, Elektronika

Mateusz Nowak
Programowanie

Mikołaj Kaźmierczak
Mechanika, Mechatronika

Kacper Kisiołek
Programowanie

Antek Borowski
Programowanie

Michał Pindych
Elektronika

Marika Czarnowska
Marketing

Maciek Komaniecki
Mechatronika/Marketing

Łukasz Cieślak
Mechatronika

Kinga Wochal
Marketing

Wiktor Woźniak
Mechatronika
Rekrutacja
Cześć!
Jeżeli chcesz dołączyć do naszego zespołu wypełnij formularz i porozmawiajmy na żywo!
Na tym etapie nie muśisz być mistrzem świata, wystarczą mistrzowskie chęci do rozwoju i nauki!
PCz Rover Team ? To brzmi dumnie!
Galeria

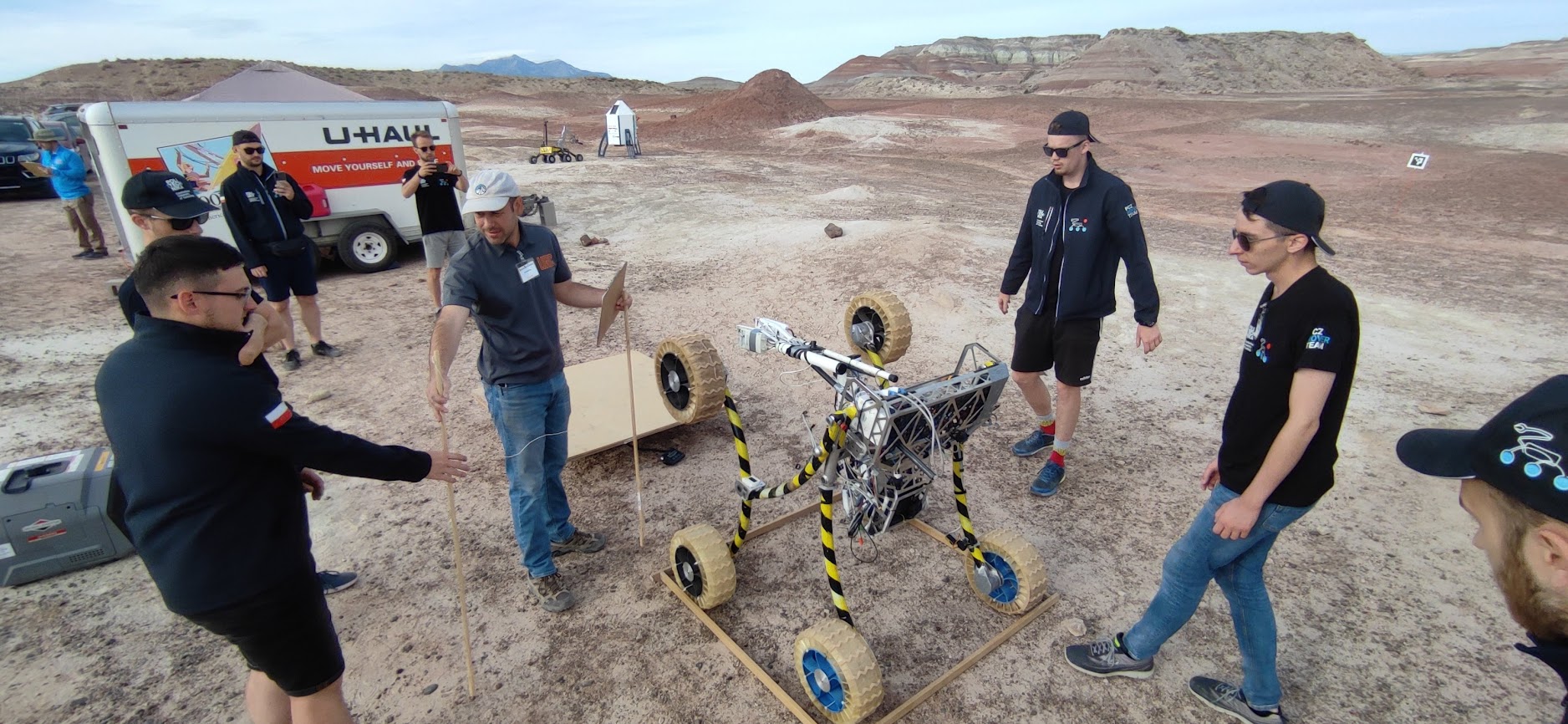
Łazik Modernity II+ na pustyni w stanie Utah 2019
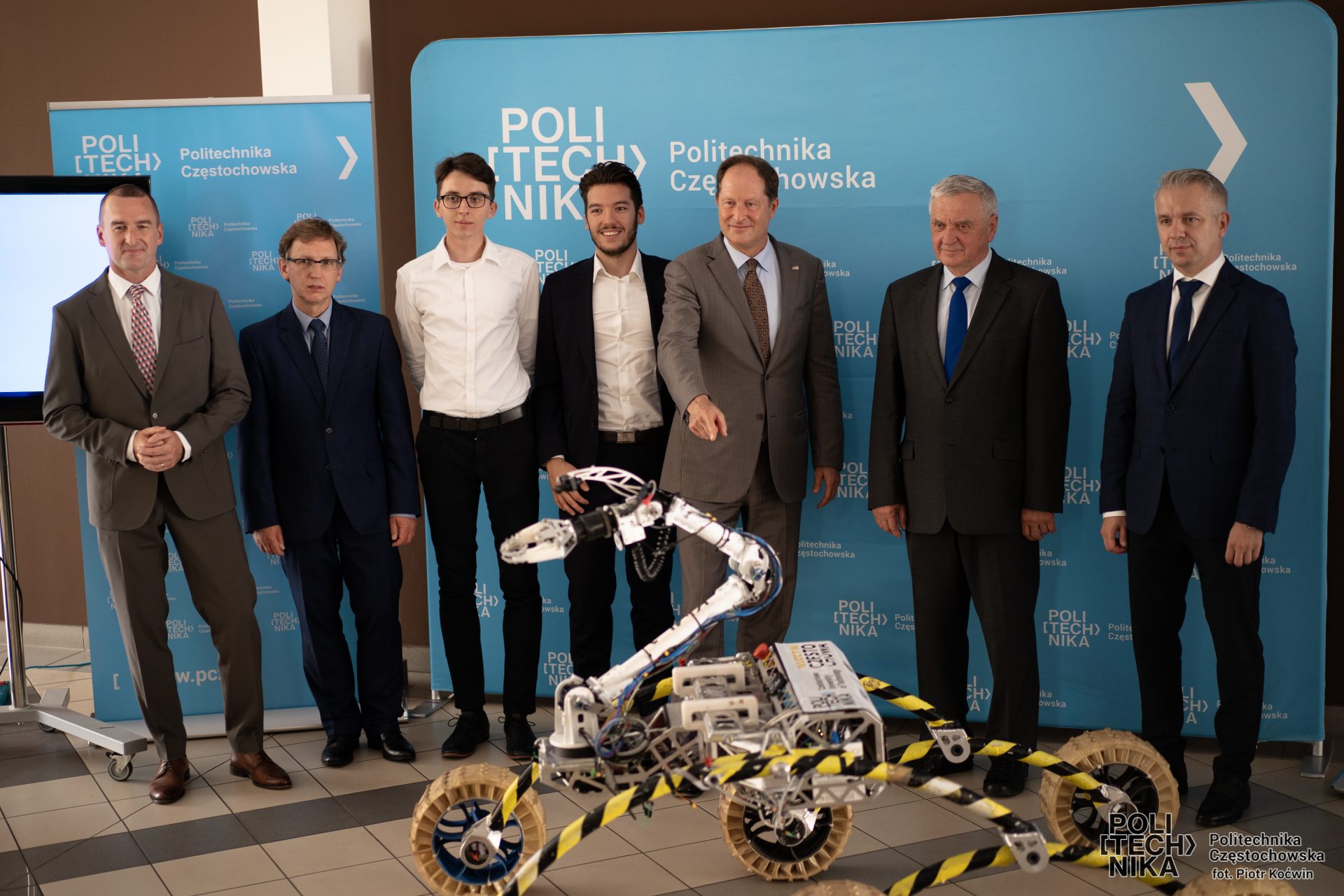
Z wizytą ambasador USA - Mark Brzezinski - PCz Lipiec 2022

Z wizytą ambasador USA - Mark Brzezinski - PCz Lipiec 2022

Z wizytą ambasador USA - Mark Brzezinski - PCz Lipiec 2022

Łazik Modernity II+ na pustyni w stanie Utah 2019

Łazik Modernity II+ na pustyni w stanie Utah 2019

Przygotowania do konkurencji URC 2022
Mierzenie łazika URC 2022

Misja serwisowania sprzętu URC 2022

Nasz zespół na zawodach URC 2022

Łazik Modernity 3 na pustyni w stanie Utah 2022

Politechnika Częstochowska 2022

Łazik podczas konkurencji serwisowania sprzętu URC 2022

Forum Wizja Rozwoju 2022 - Stanisław Szwed
Do URC 2024 pozostało:
0dni
0godzin
0minut
0sekund
Sponsorzy


dowiedz się więcej
Zostań partnerem
Oferta Partner
- Aktywny link oraz logo firmy na fanpage’u na facebooku oraz instagramie łazika
- Aktywny link oraz logo firmy na stronie WWW łazika
- Logo Państwa firmy w widocznym miejscu na łaziku
- Logo Państwa firmy na materiałach promocyjnych takich jak film promujący łazika, promujący politechnikę itd.
- Specjalny post na wszystkich social mediach łazika informujący o współpracy Państwa firmy z naszym zespołem
Oferta Partner Plus
To samo co zawiera oferta „Partner” a ponadto:
- Możliwość nagrania specjalnego filmu – prezentacji łazika pod kątem Państwa firmy
(łazik w barwach oraz logach państwa firmy). - Zestaw gadżetów zespołu oraz filmik z relacji z zawodów specjalnie pod kątem Państwa firmy
Oferta Partner Strategiczny
To samo co zawiera oferta „Partner +” a ponadto:
- Możliwość promowania Państwa firmy na wybranych przez Państwa firmę targach, pokazach, konferencjach itd. (zespół oraz łazik w pełni wyposażony w Państwa materiały promocyjne).
Ponadto jesteśmy również otwarci na współpracę typu barter.
Przykładowa umowa o współpracęKontakt
Filmy
URC - Dokumentacja wideo SAR 2020

URC - Dokumentacja wideo SAR 2021

Zawody URC 2022

URC - Dokumentacja wideo SAR 2019
URC - Dokumentacja wideo SAR 2018

Zawody URC 2017
Zasłużeni Członkowie
Piotr Szczyrba
Piotr Ptak
Maciej Pierzgalski
Jan Wielgus
Filip Depta
Janusz Binek
Marcin Skotniczny
Łukasz Pałuszka
Mateusz Tądel
Tomasz Zając
Radosław Krawczyk
Paweł Filipiak
Grzegorz Ptak
Remigiusz Plaza
Damian Bulski
Michał Dedyk
Cezary Kołodziejek
Antoni Wielgus
Daniel Kucharski